[en] [fr] [ru]
gnuComet
Возвращаем веселье в начало 90-х !

| Размер |
M |
| Площадь (m2) |
25 м2 |
| Размах (м) |
10.33 |
| Удлинение | 4.27 |
| Кол-во секций | 28 |
| Closed cells |
4+0.5+0.5 |
| Диапазон веса (Kg) |
60-80 |
| Коэффициент качества |
5.9+ |
| Точки подвески | 4 |
| Свободные концы | 3 / 4 |
| Extrados and intrados |
рипстоп 40 гр/м2 |
| Нервюры |
рипстоп 40 гр/м2 hard |
| Расход строп (м | - |
| Нормальные стояки |
Да |
| Варио сиденья |
Да |
| Сертификация | Нет |





 |
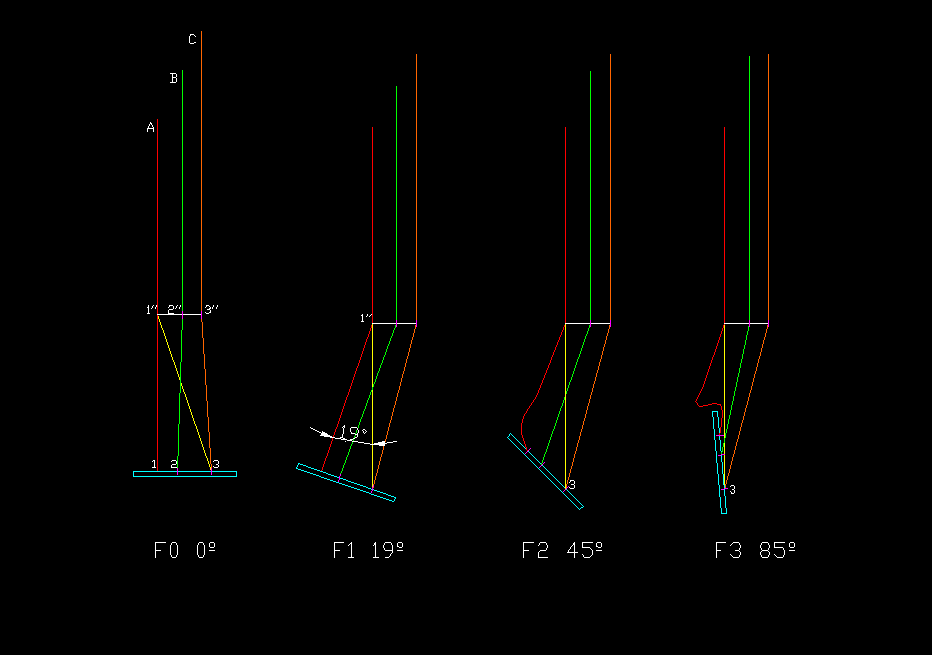
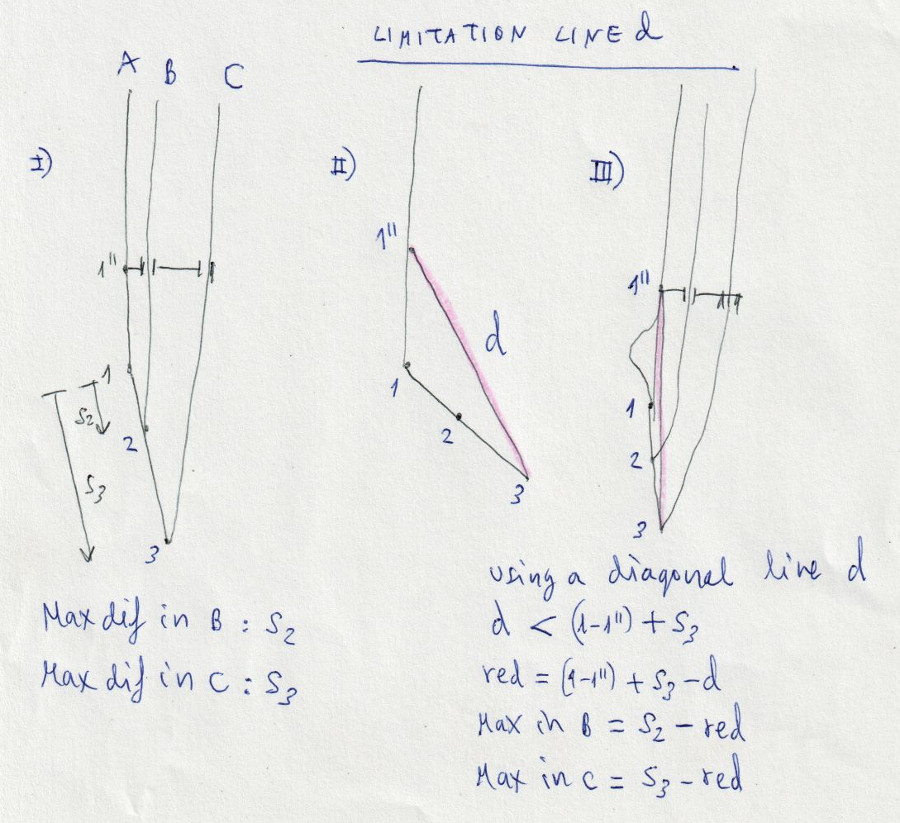
Рассмотрим
трехточечное рулевое сиденье. Свободных концов А (красный), В (зеленый)
и С (оранжевый) крепятся к сиденью жесткой пластиной в точках 1,2 и 3.
Свободны концы А фиксируется в точке 1 '' распоркой до точки 2 '', где
свободно скользит подступенок B, и еще одна прокладка до точки 3'', где
свободно скользит Свободные концы C. Мы можем рассмотреть первую упрощенную модель, в которой точка 1 зафиксирована, а пластина поворачивается на угол альфа относительно этой точки. Наклоняя наш вес вперед, пластина поворачивается на положительный угол. Точка 2 перемещается в положение 2', а стояк B скользит вверх через точку 2''. Точка 3 перемещается в положение 3', а стояк С скользит вверх через точку 3''. В результате получается ускорение крыла. При наклоне веса назад угол альфа становится отрицательным, и в результате крыло замедляется. Таким образом, мы можем динамически и интуитивно регулировать угол падения крыла. Управление дополняется перемещением веса нашего тела в ту сторону, куда мы хотим повернуться. Таким образом, дополнительное управление с помощью команд менее необходимо. Теперь посчитаем, каково удлинение или укорочение свободных концов под углом альфа на жесткой пластине. Если мы посмотрим на детальный рисунок в правом нижнем углу, точка 2 переместится в положение 2'. Учитывая ортогональные оси с центром в точке 1 и s2 расстояние между точками 1 и 2, координаты точки 2 равны: 2'x = s2 · con (альфа) 2'y = s2 · sin (альфа) Расстояние между точками 2' и 2'' вычисляется по ее координатам, которые известны: расстояние(2'-2'')=sqrt((2'x-2''x)^2+(2'y-2''y)^2) И то же самое для расчета расстояния между точками 2 и 2'': расстояние(2-2'')=sqrt((2x-2''x)^2+(2y-2''y)^2) Экспериментальное удлинение для стояка B составляет: расстояние (2-2'') - расстояние (2'-2'') И удлинение стояка С рассчитывается аналогично: расстояние(3-3'')-расстояние(3'-3'') Теперь у нас есть хорошее математическое приближение того, как изменяется длина свободных концов в зависимости от геометрии рулевого сиденья. Следующим шагом будет изучение других возможных конфигураций положения сборки плиты и стояков, а также изучение необходимости добавления диагональных линий для ограничения крайних положений пластину, если это необходимо. |
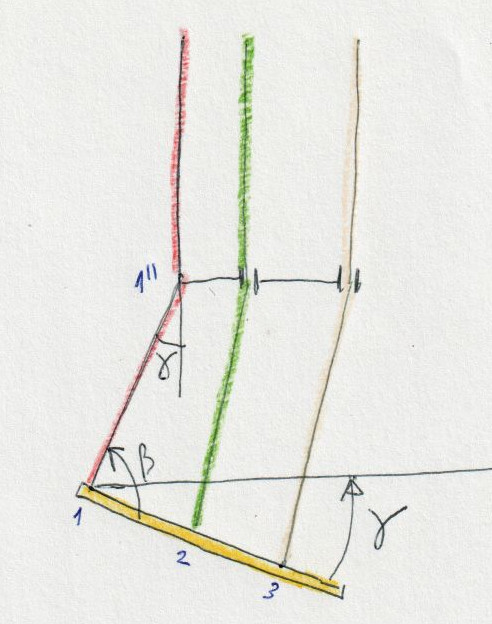 |
Рис.
3. Пилотный стул в полете может принимать и другие геометрические
формы. Мы рассматриваем модель, в которой лямка 1-1 '' поворачивается
на гамма-угол в точке 1 '' по отношению к вертикали, а пластина сиденья
по-прежнему перпендикулярна лямке 1-1 ''. Мы видим, что это примерно эквивалентно повороту подседельной пластины на угол -альфа в предыдущей модели. То есть, если мы поворачиваем угол гамма, мы получаем меньшую скорость, а если одновременно применяем угол -Альфа, мы ускоряемся. Комбинируя углы Гамма и Альфа, мы получаем разные конфигурации. Как правило, угол Гамма будет небольшим, и мы считаем угол Альфа более репрезентативным для модели. |
| A | 72 | cm | A riser |
| B | 82 | cm | B riser |
| C | 90 | cm | C riser |
| 1-1’’ | 32 | cm | |
| s2 | 4 | cm | |
| s3 | 11 | cm | |
| r2 | 5 | cm | |
| r3 | 9 | cm | |
| 1’’-3 | 33,8 | cm | |
| d | 34 | cm | Diagonal strap |