[en] [fr] [ru]
gnuComet
Remettre le vol plaisir au début des années 90's !

| Taille |
M |
| Surface (m2) |
25 m2 |
| Envergure (m) |
10.33 |
| Allongement |
4.1 |
| Caissons |
28 |
| Caissons fermés |
4+0,5+0,5 |
| Plage de poids (Kg) |
60-80 |
| Finesse |
5.9+ |
| Ancrages |
4 |
| Élévateurs |
3 / 4 |
| Extrados and intrados |
ripstop 40 gr/m2 |
| Ribs |
ripstop 40 gr/m2 hard |
| Lignes (m) |
- |
| Élévateurs normals |
Oui |
| Sellette de pilotage |
Oui |
| Certification |
Non |





 |
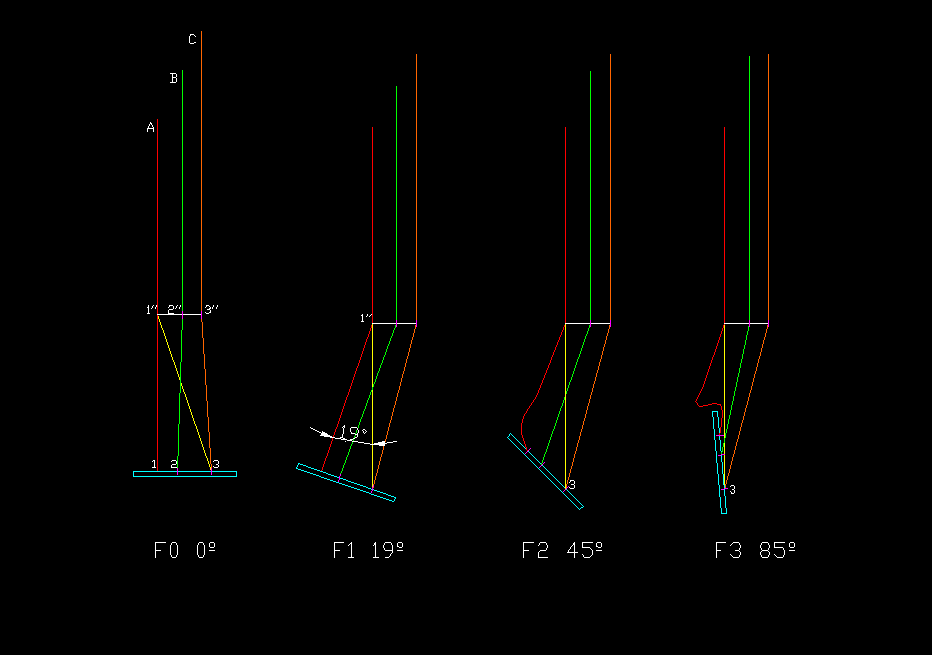
Figure 2. Considérez
une sellette à trois points. Les élévateurs A (rouge), B (vert) et C
(orange), sont fixés sur un siège avec plaque rigide rembourrée aux
points 1,2 et 3. L'élévateur A est fixé au point 1'' avec une
entretoise jusqu'au point 2' ' où l'élévateur B coulisse librement, et
une autre entretoise jusqu'au point 3 '' où l'élévateur C
coulisse librement. On peut considérer un premier modèle simplifié où le point 1 est fixe, et la plaque tourne d'un angle alpha par rapport à ce point. Inclinant notre poids vers l'avant, la plaque tourne d'un angle positif. Le point 2 se déplace en position 2', et l'élévateur B glisse par 2''. Le point 3 se déplace en position 3', et l'élévateur C glisse par le point 3''. Le résultat est une accélération de l'aile. En inclinant le poids vers l'arrière, l'angle alpha est négatif, et le résultat est le ralentissement de l'aile. De cette façon, nous pouvons ajuster l'angle d'incidence de l'aile de manière dynamique et intuitive. Le contrôle est complété par le déplacement du poids de notre corps du côté où nous voulons tourner. Ainsi, un contrôle supplémentaire avec les commandes est moins nécessaire. Calculons maintenant quel est l'allongement ou le raccourcissement causé sur les élévateurs par un angle alpha sur la plaque rigide. Si on regarde le dessin de détail en bas à droite, le point 2 se déplace vers une position 2'. En considérant des axes orthogonaux centrés au point 1, et s2 la séparation entre les points 1 et 2, les coordonnées du point 2' sont : 2'x = s2 · con (alpha) 2'y = s2 · sin (alpha) La distance entre les points 2' et 2'' est calculée par ses coordonnées, qui sont connues : dist(2'-2'')=sqrt((2'x-2''x)^2+(2'y-2''y)^2) Et pareil pour calculer la distance entre les points 2 et 2'' : dist(2-2'')=sqrt((2x-2''x)^2+(2y-2''y)^2) L'allongement expérimenté pour l'élévateur B est : distance (2-2 '') - distance (2'-2 '') Et l'allongement de l'élévateur C calculé de la même façon : dist(3-3'')-dist(3'-3'') Maintenant, nous avons une bonne approximation mathématique de la façon dont les longueurs des élévateurs varient, en fonction de la géométrie de la sellette de pilotage. La prochaine étape sera d'étudier d'autres configurations possibles de la position de l'ensemble plaque et éleévateurs, et d'étudier la nécessité d'ajouter des lignes diagonales pour limiter les positions extrêmes de la plaque, si nécessaire. |
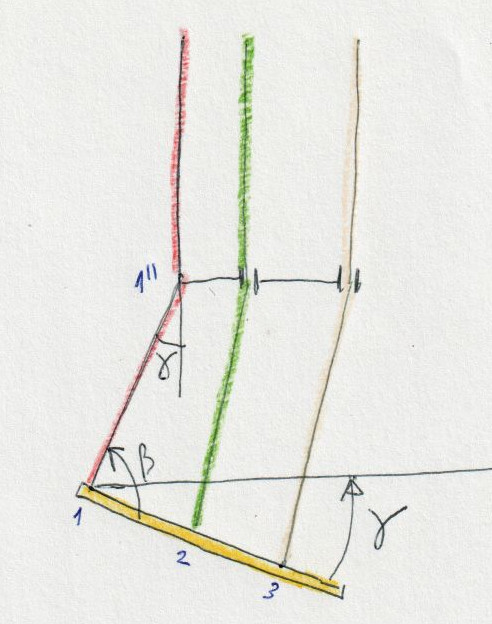 |
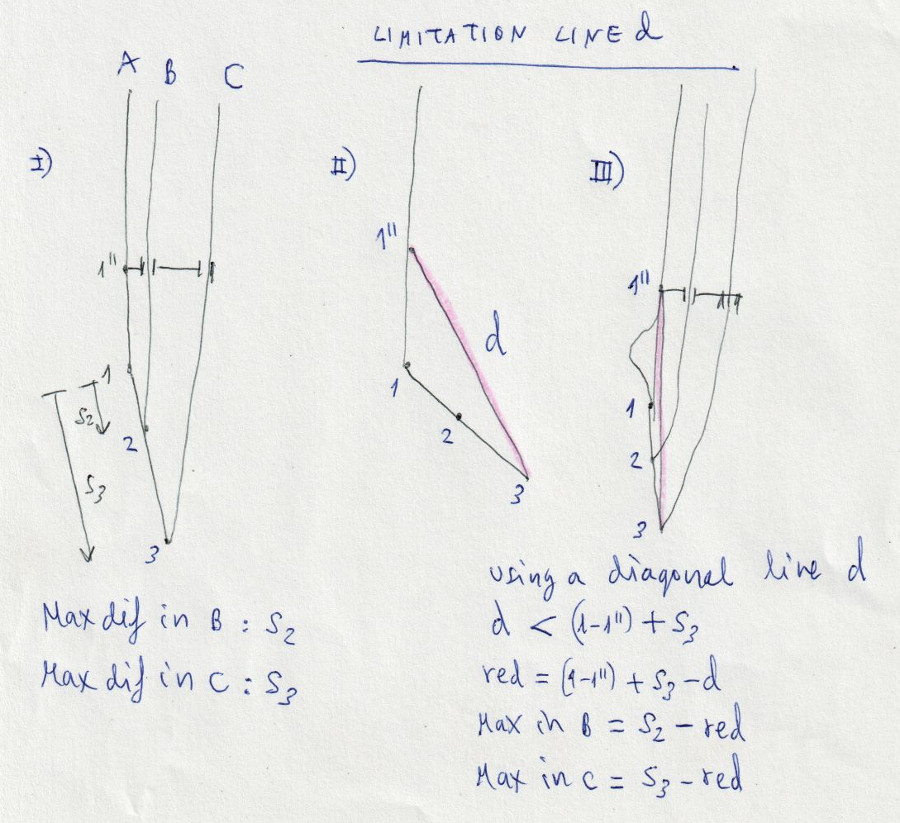
Figure
3. Le sellette de pilotage en vol peut prendre d'autres formes
géométriques. Nous envisageons un modèle où la sangle 1-1'' tourne un
angle gamma en 1'' par rapport à la verticale, et la plaque de la
sellette est toujours perpendiculaire à la sangle 1-1''. Nous pouvons voir que cela équivaut à peu près à tourner la plaque de la sellette un angle -alpha sur le modèle précédent. Autrement dit, si nous faisons pivoter l'angle gamma, nous obtenons moins de vitesse, et si nous appliquons l'angle -alpha en même temps, nous accélérons. En combinant les angles Gamma et Alpha, on obtient différentes configurations. En règle générale, l'angle Gamma sera petit et nous considérons que l'angle Alpha est plus représentatif du modèle. |
| A | 72 | cm | A riser |
| B | 82 | cm | B riser |
| C | 90 | cm | C riser |
| 1-1’’ | 32 | cm | |
| s2 | 4 | cm | |
| s3 | 11 | cm | |
| r2 | 5 | cm | |
| r3 | 9 | cm | |
| 1’’-3 | 33,8 | cm | |
| d | 34 | cm | Diagonal strap |